
やってみないと始まらない。
今回は、ベッド上でよく使う動作『寝返り』『起き上がり』に着目して説明します。
アプローチ編です💡
おさらい…
【DNS:Dynamic Neuromuscular Stabilization】
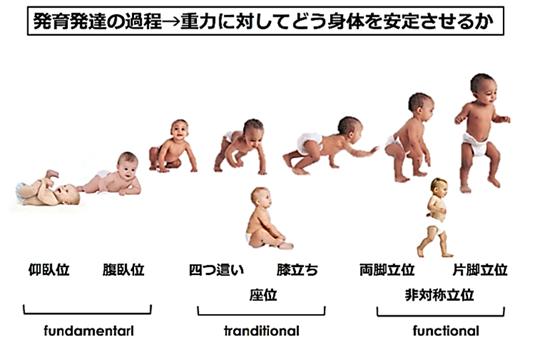
・DNSとは、日本語にすると、動的神経筋安定化・発達運動学的アプローチです。
・運動発達学に基づいた、『腹腔内圧の調節』と『深部脊柱安定筋の活性化』による機能的安定性を基礎とした身体の運動基礎理論であるとされています。
STEP 3:DNSを用いた治療とは?
【DNSアプローチ】
①ボイタの運動反射をつかう
(反射性寝返り1-4相、反射性腹這い、第1肢位)
②自動的運動を指示する
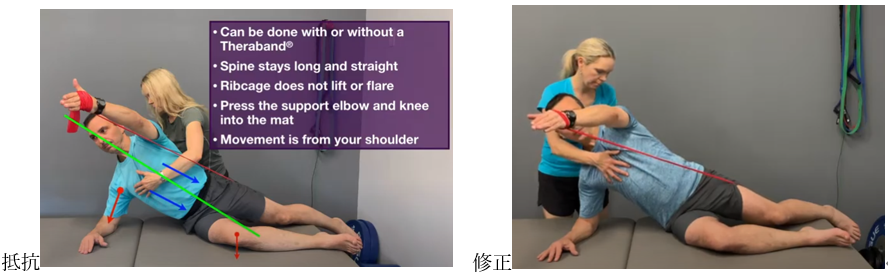
③予想される運動への抵抗・設定を変え、修正する
※以下に①-③について解説していきます。
①ボイタの運動反射
・チェコの小児神経医のバツラブ・ボイタ教授により提唱
・さまざまな姿位に特異的な刺激を与える事により、四肢・体幹の運動反応を誘発
・1950年代、脳性麻痺の子供の治療を行っている時『運動反射』の原理を発見
『反射性移動運動とは』
・反射性移動運動は新生児でも大人でも脳性麻痺児でも引き出されることを確かめ、人類の脳に生まれつき備わっている運動パターン
・仰向きや横向きにして始める反射性寝返りと、うつ伏せで始める反射性腹這いがある
・反射性寝返り:運動パターンは生後3ヶ月から8~9ヶ月の正常発達に出てくるパターン
・反射性腹這い:正常運動発達に見られる腹這いではないが、引き出される運動パターンは人が生まれてから歩くまでに必要な正常運動パターンの部分反応を示している
・ボイタ法は寝返りや腹這いそのものを練習しているわけではない
【反射性寝返りⅠ相】
出発肢位は仰向け。誘発帯は基本1つ。3ヶ月児のように、仰向けで両下肢を挙上し骨盤を傾け、4ヶ月半の寝返りの準備段階までの運動パターン(筋活動)を促通する。

【反射性寝返りⅡ相】
出発肢位は側臥位。誘発帯は基本2つ。下側の上下肢で支え前方へ体幹を持ち上げ、上側の上下肢を上前方に振り出し、四つ這いになろうとする運動パターン(筋活動)を促通する。


【反射性腹這い】
出発肢位はうつ伏せ。誘発帯は基本9つ。片方の肘で支え、そこに身体を持ち上げていこうと反対の踵で床を蹴り出し前方に腹這いするような動作が反応として現れる。正常発達でいうと、3ヶ月からの頭部持ち上げから4ヶ月半の片肢支持、さらには1才過ぎの歩行開始までの足部での支持や蹴りだし等の運動パターン(筋活動)が促通できる。
『治療効果』
反射性移動運動のそれぞれによって治療中に起こってくる反応(筋活動)には違いがあるが、共通して求められるのは、脊柱の左右対称的な伸展(背すじをまっすぐにすること)と回旋で、それらが目口手足の協調運動や上下肢の左右交互性の運動に繋がる。またボイタ法の治療では、単に運動ができるようになるだけでなく、全身の筋活動と血流の改善とともに睡眠が改善し、規則正しい生活や情緒の安定が得られるようになることを目的にしている。
『治療対象者』
1.脳性麻痺・脳性麻痺危険児・中枢性協調障害
2.脳炎脳症後遺症・その他後天性疾患(成人の脳梗塞・脳卒中なども含む)
3.二分脊椎・分娩麻痺・脊髄損傷(事故後遺症も含む)
4.筋疾患・その他退行性疾患
5.染色体異常症・奇形症候群
6.呼吸障害・摂食嚥下障害
7.側彎症・斜頚・先天性股関節脱臼・臼蓋形成不全症・多発性関節硬縮症・骨関節疾患 O脚・X脚・内反足・その他整形外科的疾患
②自動的運動
『DNS理論の不可欠な要素』
・自動的訓練
①筋のみに着目するのではなく運動パターンを変える中枢神経系の制御に注目する
②患者の参加と協力が必要
・脳の教育
①運動パターンの制御をより効率的な方法で行う
②理想的な筋バランスと機能的関節中心化を達成すると共に、過負荷を避ける
・運動は患者がその動きに注意を払えるようにゆっくりとしたものから始める。
・量よりも『質』を重要視する
➡患者が運動を生理学的な運動パターンで遂行できる事
・発達姿勢を様々に応用して行うことが出来る。
➡しかし常に基本に忠実である
➡①機能的関節中心化、②適切な負荷、③適切な姿勢姿位
例1)寝返り動作:
3か月の姿勢(背臥位)でのアプローチ
※運動負荷量に応じて介助や道具を使用する
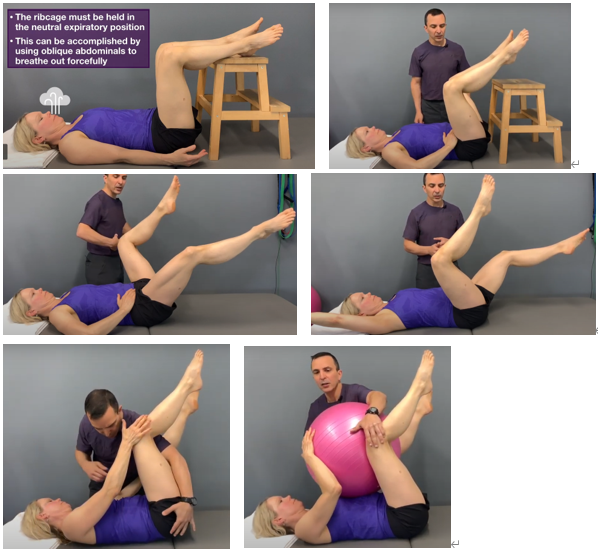
例2)起き上がり動作:
7か月の姿勢(前腕支持の斜め側臥位)でのアプローチ
※運動負荷量に応じて介助や道具を使用する
③運動療法の原則
『運動強度の設定方法』
1)重心:
低い➡高い
2)支持基底面①:
広い➡狭い
3)支持基底面②:
固定➡移動
4)レバーアーム:
近い➡遠い
5)制御する関節:
少➡多
6)順序①:
CKC➡OKC➡抵抗運動
7)順序②:
背臥位➡腹臥位~側臥位➡四つ這い➡高這い~立位

Czech Get-up
➡STEP4で紹介していきます☺